Applied Sciences, Free Full-Text
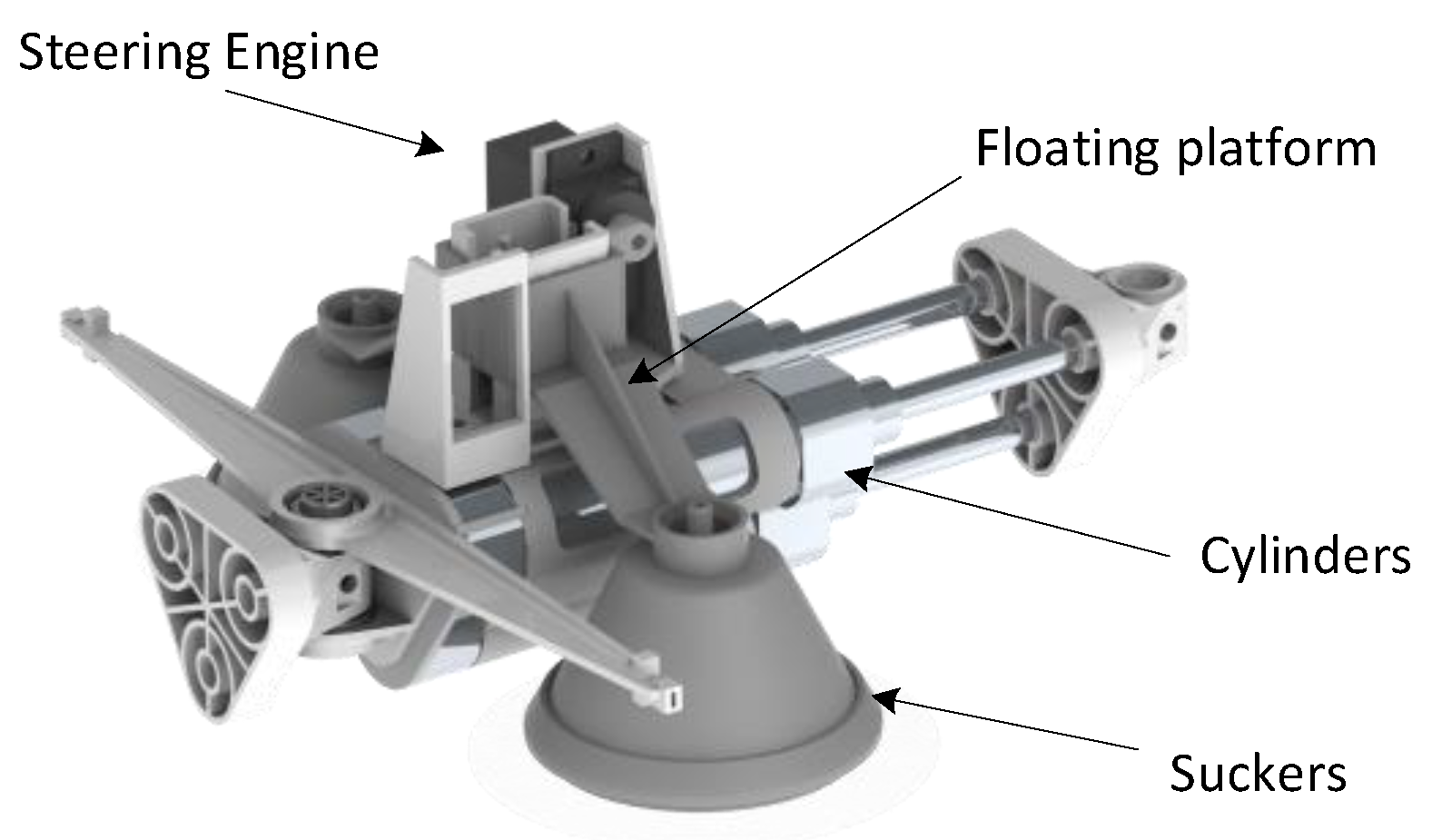
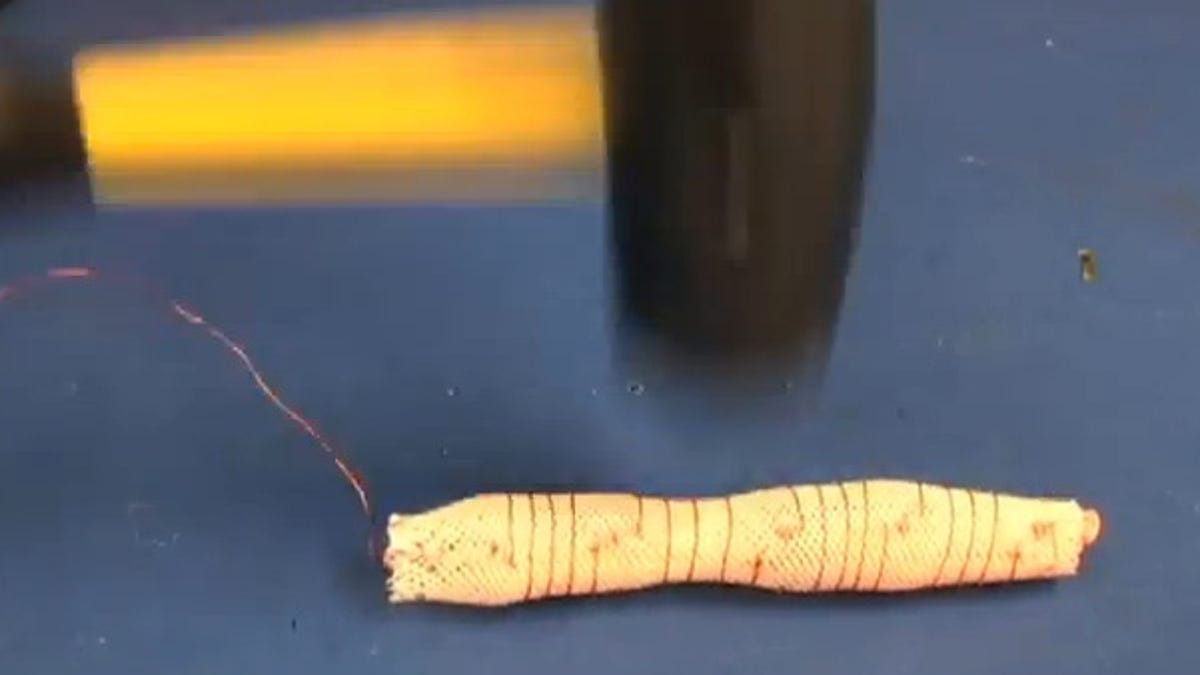
Based on the motion principle of bionic earthworms, we designed and fabricated a novel crawling robot driven by pneumatic power. Its structure is divided into four segments, and its motion process is periodic with high stability. Due to the pneumatic suction cups mounted on its feet, it is able to crawl on smooth horizontal, inclined, or vertical walls. On this basis, we designed a novel underactuated steering mechanism. Through the tendons on both sides and the springs installed on the side of the robot, we accurately controlled the steering motion of the robot. We analyzed the steering process in detail, calculated the influence of external parameters on the steering process of the robot, and simulated the trajectory of the robot in the steering process. The experimental results validated our analysis. In addition, we calculate the maximum thrust that each segment of the robot can provide, and determine the maximum load that the robot can bear during climbing motions.
Applied Sciences, Free Full-Text, driving simulator 2009

Applied Sciences, Free Full-Text, rated speed

Home Discover Applied Sciences
Applied Sciences, Free Full-Text, smooth contour wireless

Applied Sciences, Free Full-Text, moderate control
Applied Sciences, Free Full-Text, human body shape
Applied Sciences, Free Full-Text, range pile

Shop Only Authentic Applied Sciences, Free Full-Text, smart weights
Applied Sciences, Free Full-Text, gas hupe dose
Applied Sciences, Free Full-Text, Pantograph

Write for Applied Data Science. We are opening up our blog to talented…, by David Foster, Applied Data Science
Applied Sciences, Free Full-Text, press f to pay respect
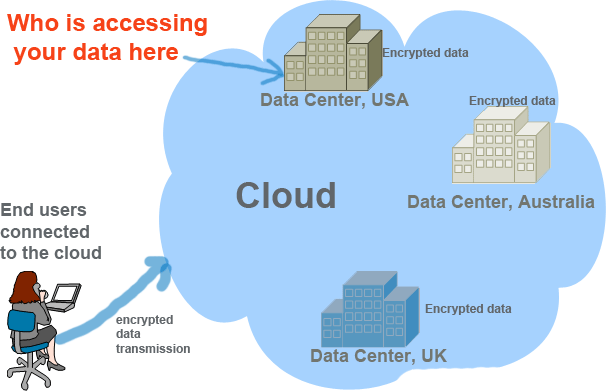
Applied Sciences Free Full-Text Privacy-Aware Cloud

Applied Sciences, Free Full-Text, Surgical Glue