Design and fabrication of a worm robot prototype

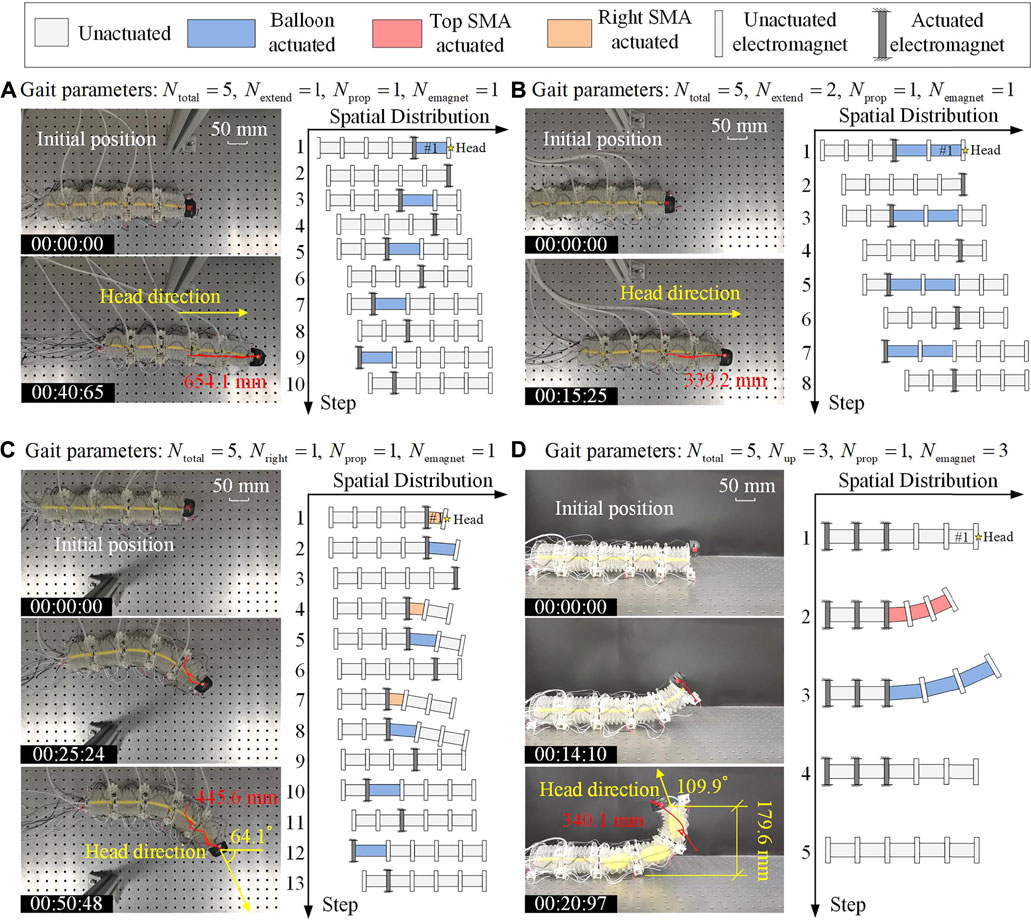
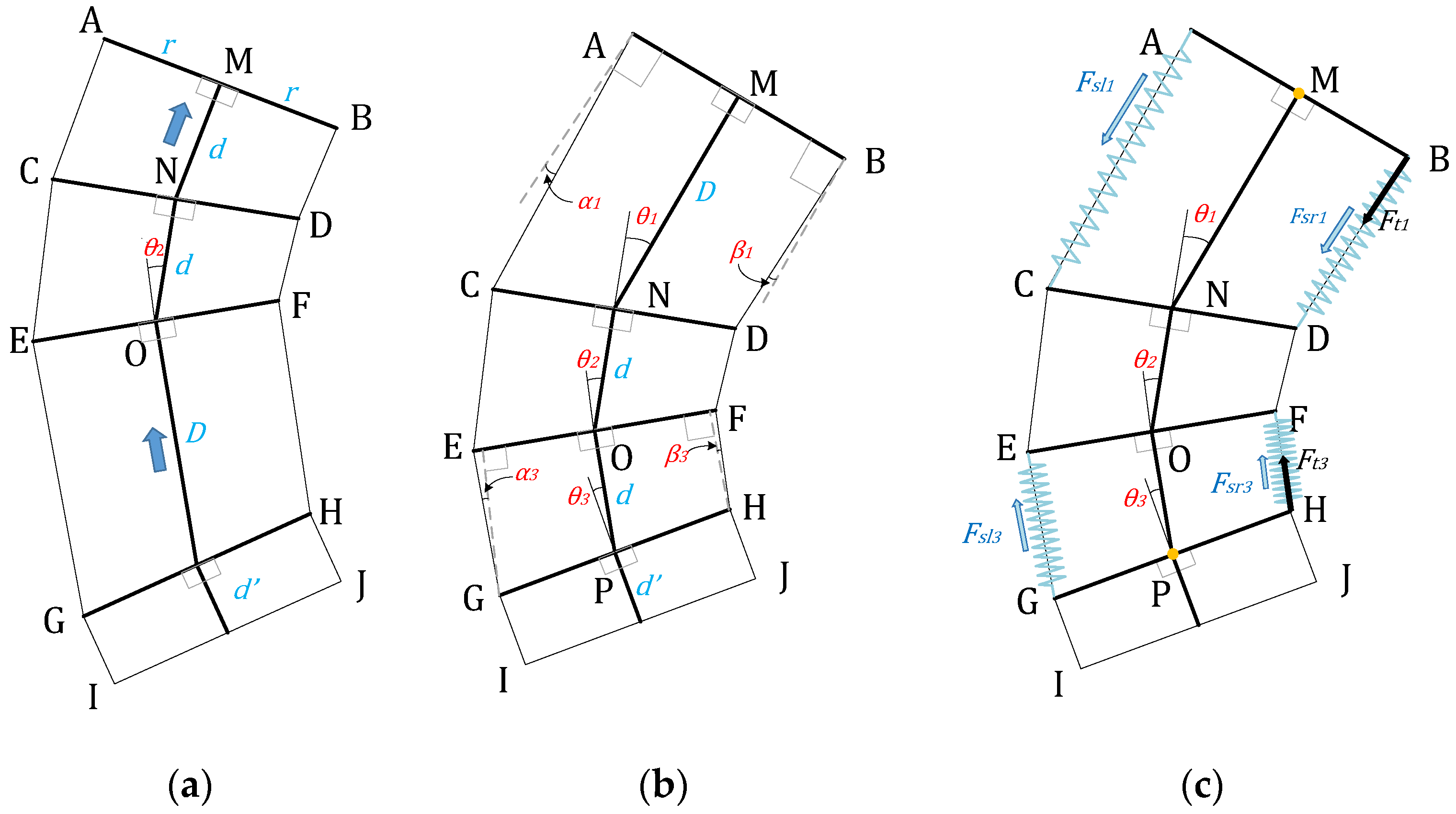
Movement in narrow channels or uneven terrains is one of the challenges concerning the robotic engineering. Inspired by nature, we can provide solutions for these problems. For example, caterpillar worms propose a simple plan of crawling locomotion that is able to cope to the limitations imposed by path. Hence, we were interested in imitating the caterpillar worms' locomotion by a crawling robot prototype. Similar to caterpillars, progress in our crawling robot is achieved by propagating a trapezoidal wave from tail to head in the vertical plane. The locomotion mechanism has been modelled by a planar 5-link chain. Indeed, by dividing a complete course of motion to some separated "sub-motions", each one can be treated as a robotic manipulator, and by this way equations of motion are individually derived for each sub-motion. After simulations, design of mechanical and electrical components is prepared. Experimental tests of the fabricated robot prototype indicate a good performance in moving forward, which are compatible with the simulation findings of our previous researches.
Actuators, Free Full-Text
Frontiers Yoshimura-origami Based Earthworm-like Robot With 3-dimensional Locomotion Capability
Sensors, Free Full-Text

Mohammad-Reza NOORANI Assistant Professor of Mechatronics - PhD
Applied Sciences, Free Full-Text
Actuators, Free Full-Text

PDF] Analysis and Design of Asymmetric Oscillation for Caterpillar

Frontiers Actuation and design innovations in earthworm-inspired soft robots: A review

An earthworm-like modular soft robot for locomotion in multi-terrain environments

Design and fabrication of a worm robot prototype

Applied Sciences, Free Full-Text






